


研究成果目標
本課題で目指していること
産業上のブレークスルーポイント
- 限界にきている形状工夫に基づく空力設計を根本から革新する設計の考え方を導入
- 輸送機器・流体機器における格段の性能向上や低騒音化が実現
- 世界をリードする輸送機器・流体機器設計ツールを獲得
社会への波及効果
- 流体機器の高性能化による省エネルギー化
- 自然エネルギーの有効利用と効率化
- 社会(流体)騒音の低減化
- 世界に誇る日本のものづくり技術を更に発展
具体的な成果目標
マイクロデバイスの作動原理の解明
流体制御の基礎となるマイクロデバイスの作動原理の解明を行います.平成24年度までに小型の流体機器の流体制御メカニズムを解明し知識基盤として整理してきました.今後は「京」を利用することで初めて可能になる,これまでより一回り大きなサイズ(ある種の流体機器では実物サイズ)での現象理解を行なっていきます.具体的には,下図は小型から大型の翼型まわりの流れ場の解析結果で,大型の翼形では非常に小さな渦構造が見られていますが,今後解析を進め,このような流れ場に流体制御を適用した際の知見を知識基盤として整理していきます.
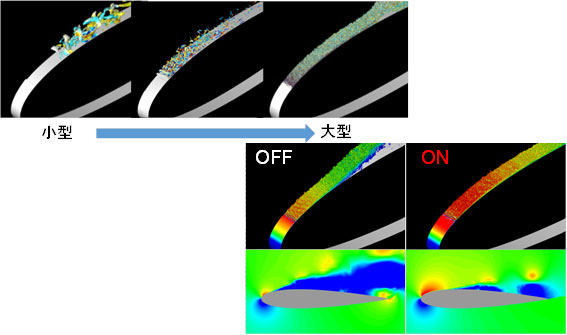
図 サイズの異なる流れ(上図:左から右へ大きな機器)と大きな機器での制御
(下図:左非制御時,右制御時)
知識基盤の構築
システムの信頼性やロバスト性など,実用化に向けた課題克服のためのパラメータサーベイを行います.様々な作動条件や設計パラメータに関する大規模な設計探査(ものづくり分野の課題4との連携)は数値シミュレーションだからこそ実現できるものです.ここで得られた知見を実設計の際に利用可能な知機基盤として整備をします。平成24年度までに「京」を使うことで初めて可能になる160を超える大規模LES解析(研究活動参照)を行なっており,設計に有用な知見が整理され始めています.提案概念の有効性の実証
産業界での実利用に向けて,実際の機体を対象としたフィードバック制御を組み込んだ流体制御シミュレータを構築し,「京」で実行することで流体制御システムとしての有効性を実証します.
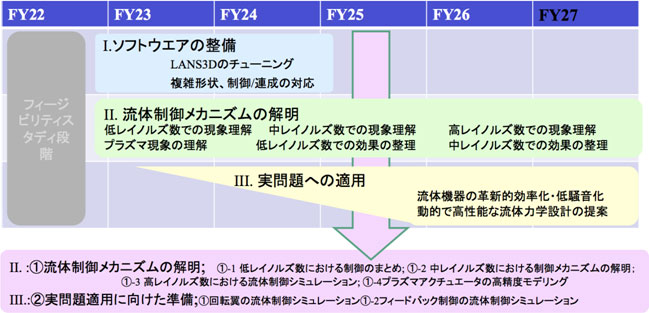
図 タイムスケジューリング